Execution of a dexterous, in-hand manipulation task with a 3D printed
4.9 (606) · € 34.00 · En Stock

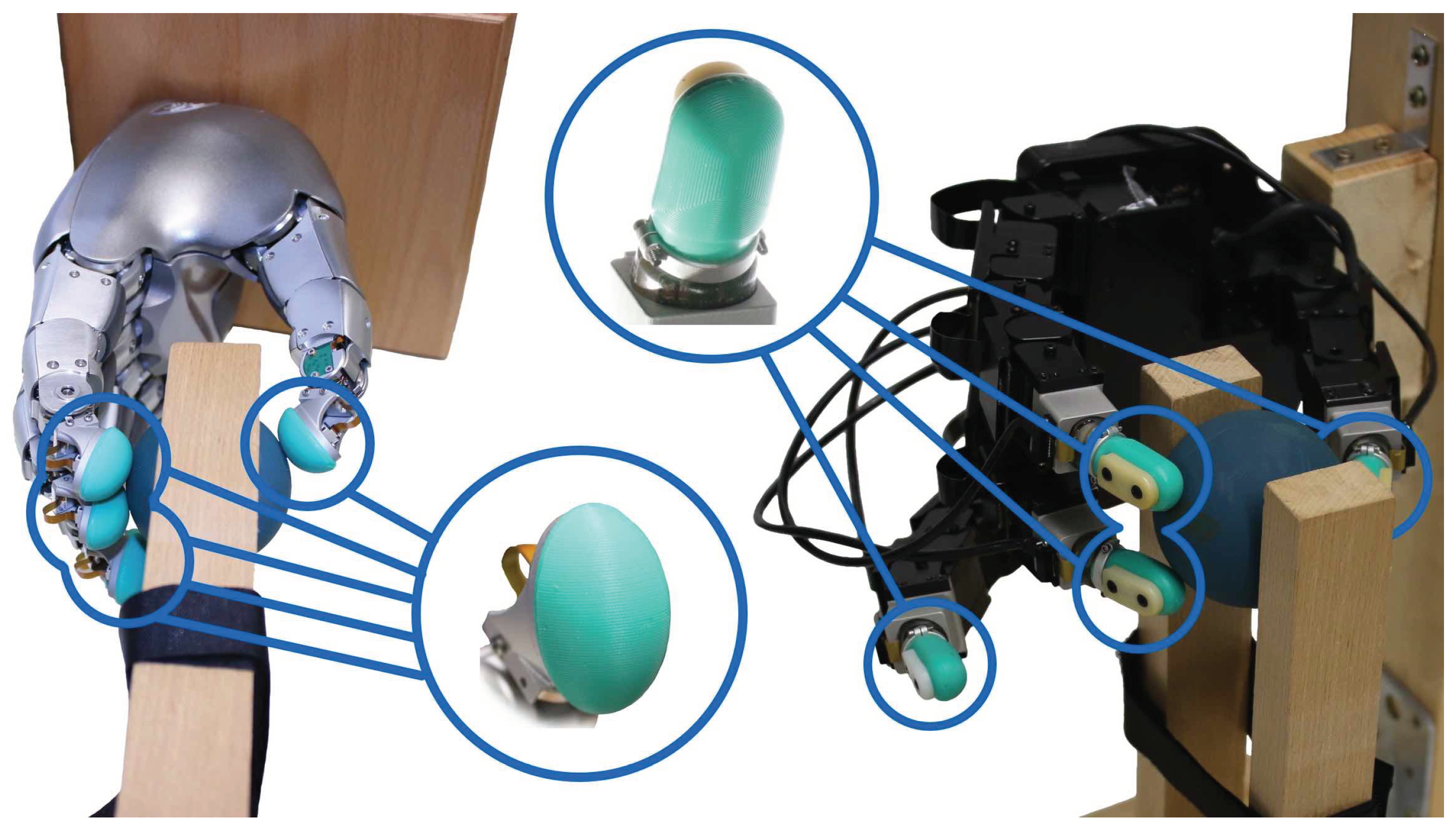
Download scientific diagram | Execution of a dexterous, in-hand manipulation task with a 3D printed cube. This equilibrium point manipulation imposes a twirling motion to the object. The figure shows a sequence of the object motion during manipulation (from subfigure a to d). from publication: EMG Based Decoding of Object Motion in Dexterous, In-Hand Manipulation Tasks | Electromyography, Manipulation and Motion | ResearchGate, the professional network for scientists.

Execution of a dexterous, in-hand manipulation task with a 3D

ETH Zurich Researchers Introduce the Biomimetic Tendon-Driven

Design, kinematic modeling and evaluation of a novel soft

Nvidia Patent Vision-based teleoperation of dexterous robotic
Sensors, Free Full-Text

The 3D printed robotic hand: (a) interior and (b) exterior

Toward Human-Like Grasp: Functional Grasp by Dexterous Robotic

The setup used for data collection. The frame is created with a
Reinforcing the Value of Simulation by Teaching Dexterity to a











